Slider Cam / Pont Roulant
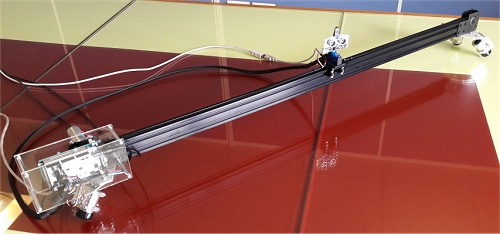

Ce système est basé sur un rail portant un chariot motorisé par un moteur à courant continu. Il se décline en deux sous-systèmes permettant de réaliser des expériences très différentes:
-
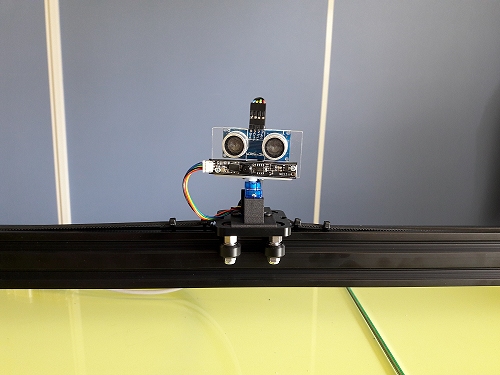
Slider Cam: le chariot motorisé porte une Webcam et un capteur de distance, tous les deux fixés sur une tourelle pivotant grâce à un servomoteur. Les activités liées à cette partie opérative sont les suivantes:
- Suivi du déplacement d'un objet de couleur: le chariot fait un "travelling" automatique afin de maintenir l'objet au centre du champ de vision de la Webcam
- Pointage automatique sur un objet de couleur: lorsque l'on commande le mouvement du chariot, le servomoteur fait pivoter la Webcam de telle sorte que l'objet reste au centre de son champ de vision
-
Asservissement de distance: cette expérience permet de faire bouger le chariot en approchant ou en éloignant un obstacle devant le capteur de distance (l'asservissement fait en sorte de maintenir la distance constante)
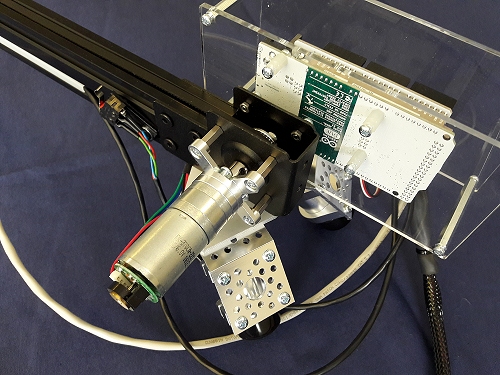
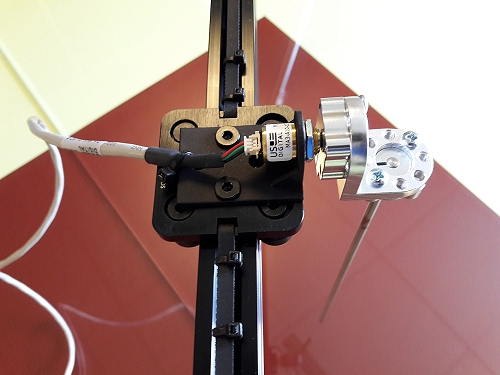
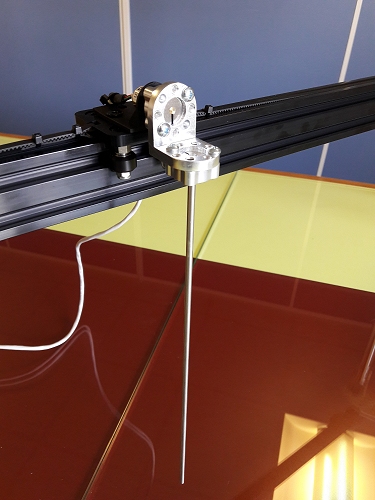
- Pont Roulant: le chariot motorisé porte une tige libre en rotation, celle-ci étant mesurée par un codeur absolu. Il est ainsi possible de reproduire un problème typique dans l'industrie: le déplacement d'un pont roulant. L'objectif est de déplacer le chariot tout en minimisant au maximum les oscillations de la tige
Dans les deux cas, le système de base permet de réaliser en plus les activités suivantes:
- Commande en tension (boucle ouverte)
- Asservissement en courant
- Asservissement en vitesse du chariot
- Asservissement en position du chariot
- Pilotage manuel ou semi-automatique via un générateur de signal évolué dans le logiciel MyViz (https://www.3sigma.fr/Telechargements-MyViz.html) permettant de modifier les réglages (y compris des asservissements) pendant le fonctionnement du système
- Pilotage par programme grâce à une API Python exécutable sur l'ordinateur hôte
Vidéo de présentation du système
Disponibilité
Ces systèmes sont disponibles dans notre boutique en ligne:
- Slider Cam: https://boutique.3sigma.fr/183-slider-cam.html
- Pont Roulant: https://boutique.3sigma.fr/184-pont-roulant.html
Vous pouvez également nous demander un devis et / ou une présentation personnalisée à l'adresse suivante: info@3sigma.fr.
Notez que les parties opératives sont interchangeables via dévissage / vissage et connection des capteurs / actionneurs sur la carte d'entrées / sorties. Vous pouvez par exemple acquérir un Slider Cam complet et une partie opérative "Pont Roulant" (ou l'inverse):
- Partie opérative "Slider Cam": https://boutique.3sigma.fr/185-partie-op%C3%A9rative-slider-cam.html
- Partie opérative "Pont Roulant": https://boutique.3sigma.fr/186-partie-op%C3%A9rative-pont-roulant.html
Composants du système
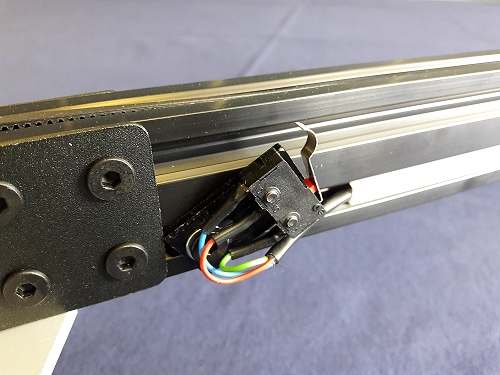
Ces deux systèmes sont constitués d'un chariot à galets se déplaçant sur un rail grâce à l'action d'un moteur à courant continu, via une poulie entraînant une courroie crantée attachée au chariot. Deux capteurs de fin de course permettent de couper la commande lorsque le chariot arrive en butée.
Le moteur (https://boutique.3sigma.fr/77-moteur-%C3%A0-courant-continu-r%C3%A9ducteur-971-codeur-incr%C3%A9mental-48-cpr.html) intègre un codeur incrémental permettant de mesurer le déplacement du chariot avec une résolution de 0.12mm.
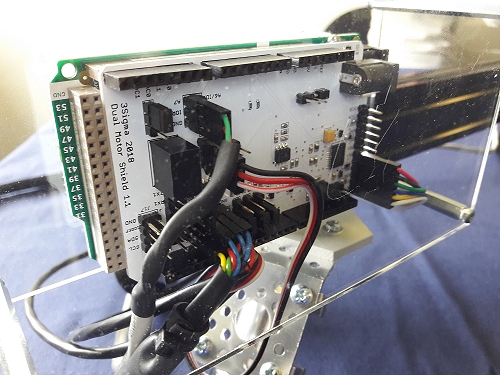
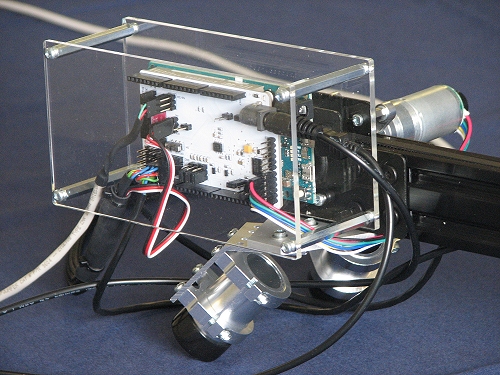
Le système est commandé par une carte Arduino Due sur laquelle est connectée un shield de commande moteur développé par nos soins, basé sur un driver Toshiba TB6612FNG. Cette carte intègre également un capteur de courant pour chacune des deux voies du driver, ainsi que des connecteurs permettant de brancher facilement les capteurs et actionneurs de chaque partie opérative:
-
Slider Cam:
- Webcam (branchée sur l'ordinateur hôte)
- Capteur de distance à ultrasons
- Servomoteur permettant d'orienter la tourelle sur laquelle sont montés les deux éléments pré-cités
-
Pont Roulant:
- Codeur absolu analogique. Son axe, monté sur roulement à billes, supporte directement la tige permettant de simuler le système de pont roulant
Logiciels et documentation
Ces systèmes sont livrés avec les éléments suivants:
- Documentation complète
- Programmes Arduino
- Tableaux de commande et de visualisation utilisables avec le logiciel MyViz (https://www.3sigma.fr/Telechargements-MyViz.html)
- Programmes Python utilisant la bibliothèque OpenCV pour le traitement des images de la Webcam
- API Python permettant de donner, par programme (exécuté sur l'ordinateur hôte), des consignes de mouvement au chariot
- Modèles Scilab / Xcos