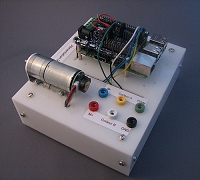
Ensemble Commande de moteur à courant continu
Vous trouverez ci-dessous les téléchargements de l'ensemble "Commande de moteurs électrique" (https://boutique.3sigma.fr/12-robots).
Liens directs vers les versions suivantes:
Versions Romeo et Arduino

Documentation:
CommandeMoteurCC_longue_4.1.pdf (carte Romeo)
CommandeMoteurCC_Uno_longue_1.2.pdf (carte Arduino Uno)
Librairies additionnelles:
Ces librairies sont nécessaires pour pouvoir compiler les programmes Arduino (voir plus loin). Elles doivent être décompressées dans le sous-répertoire "libraries" de votre installation Arduino.
-
FlexiTimer2:
FlexiTimer2.zip -
digitalWriteFast:
digitalWriteFast.zip -
EnableInterrupt
EnableInterrupt.zip
Programmes Arduino:
Ces programmes sont abondamment commentés pour vous permettre de bien les comprendre.
-
Commande en tension:
CommandeEnTension_3.1.zip -
Asservissement de vitesse:
AsservissementVitesse_3.1.zip -
Asservissement de position:
AsservissementPosition_3.2.zip -
Identification des paramètres du moteur (systèmes livrés après le 1er décembre 2016):
Identification_1.0.zip
Applications de pilotage depuis l'ordinateur:
Ces applications permettent de piloter le moteur via votre ordinateur après avoir connecté ce dernier avec la carte Romeo via le câble USB fourni.
Windows
-
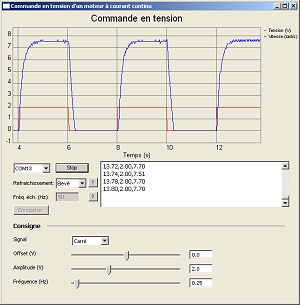
Commande en tension:
CommandeMoteurEnTension_2.8.zip
-
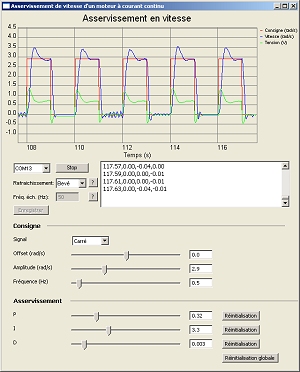
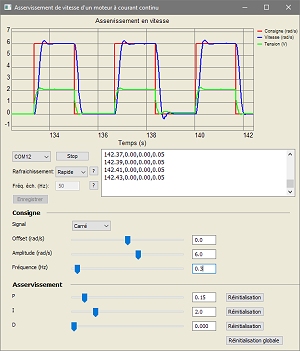
Asservissement de vitesse:
AsservissementMoteurEnVitesse_2.8.zip
-
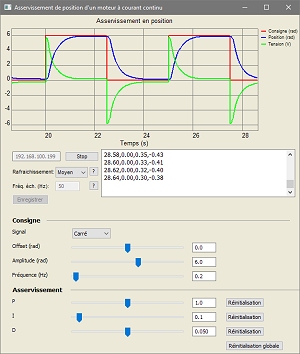
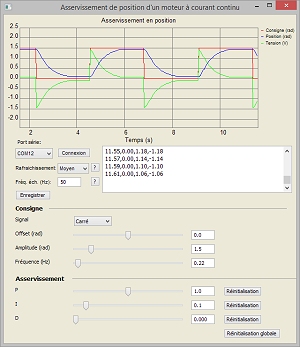
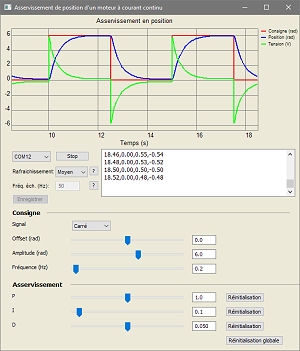
Asservissement de position:
AsservissementMoteurEnPosition_2.7.zip
Application d'identification automatique
L'application d'identification automatique nécessite l'installation du logiciel MyViz, que vous pouvez télécharger ici:
https://www.3sigma.fr/myviz/MyViz.zip
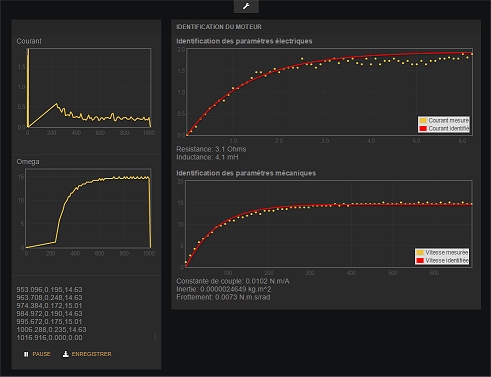
Le tableau de bord à utiliser est le suivant:
Contributions:
Cette contribution permet de programmer l'asservissement du moteur à partir de Simulink.
Version pcDuino

Documentation:
CommandeMoteurCC_pcDuino_longue_2.1.pdf
Programmes Python:
Ces programmes sont disponibles en code source sur la carte pcDuino du système.
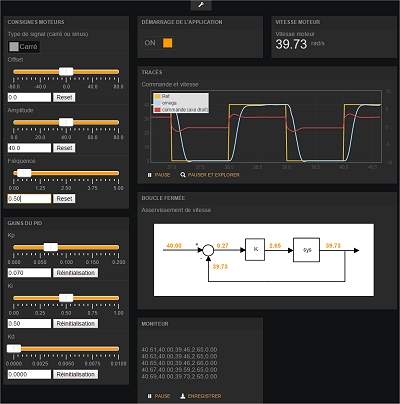
Applications de pilotage depuis l'ordinateur:
Ces applications permettent de piloter le moteur via votre ordinateur après avoir connecté ce dernier avec la carte pcDuino via le câble Ethernet et l'adaptateur Ethernet / USB fournis. Elles reposent sur le le logiciel MyViz (https://www.3sigma.fr/Telechargements-MyViz.html) qui permet de bâtir facilement des tableaux de bord (modifiables) de pilotage et de visualisation.
Des tableaux de bord pour la commande en tension, les asservissements de vitesse, de position et pour l'utilisation de l'API sont disponibles dans l'archive suivante:
https://www.3sigma.fr/moteurcc/myviz/MoteurCC-MyViz.zip
Exemples:
-
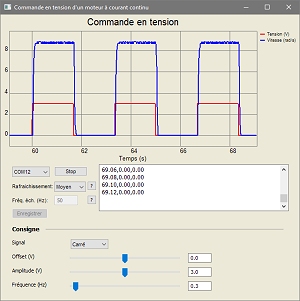
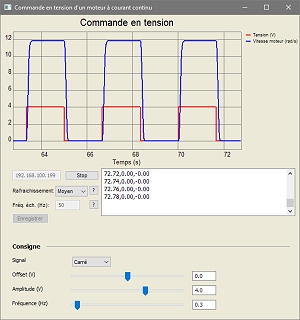
Commande en tension avec MyViz

-
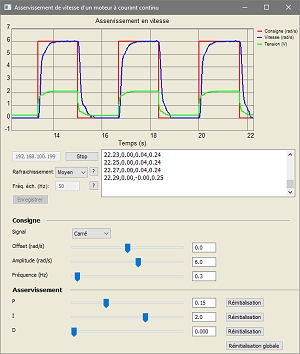
Asservissement de vitesse avec MyViz
Anciennes interfaces
Pour des raisons de compatibilité, les anciennes interfaces sont toujours disponibles. Vous pouvez les télécharger ici:
-
Commande en tension:
InterfaceReseauCommandeMoteurEnTension_1.3.zip -
Asservissement de vitesse:
InterfaceReseauAsservissementMoteurEnVitesse_1.3.zip
Version Raspberry C / Python
Documentation:
CommandeMoteurCC_RaspberryPython_longue_1.2.pdf
Librairies additionnelles:
Ces librairies sont nécessaires pour pouvoir compiler les programmes Arduino (la documentation). Elles doivent être décompressées dans le sous-répertoire "libraries" de votre installation Arduino.
-
AStar32U4:
AStar32U4.zip -
FlexiTimer2:
FlexiTimer2.zip
Programmes Arduino:
Ces programmes sont abondamment commentés pour vous permettre de bien les comprendre.
-
Commande en tension:
AStarCommandeEnTension_1.0.zip -
Asservissement de vitesse:
AStarAsservissementVitesse_1.0.zip -
Asservissement de position:
AStarAsservissementPosition_1.0.zip
Programmes Python:
Ces programmes sont disponibles en code source sur la carte Raspberry Pi du système.
Applications de pilotage depuis l'ordinateur pour les programmes Arduino:
Ces applications permettent de piloter le moteur via votre ordinateur après avoir connecté ce dernier avec la carte A-Star via le câble USB fourni.
Windows
-
Commande en tension:
CommandeMoteurEnTension_2.8.zip
-
Asservissement de vitesse:
AsservissementMoteurEnVitesse_2.8.zip
-
Asservissement de position:
AsservissementMoteurEnPosition_2.7.zip
Applications de pilotage depuis l'ordinateur pour les programmes Python:
Ces applications permettent de piloter le moteur via votre ordinateur après avoir connecté ce dernier avec la carte pcDuino via le câble Ethernet et l'adaptateur Ethernet / USB fournis.
Windows
-
Commande en tension:
RaspberryPiCommandeMoteurEnTension_1.2.zip
-
Asservissement de vitesse:
RaspberryPiAsservissementMoteurEnVitesse_1.2.zip
-
Asservissement de position:
RaspberryPiAsservissementMoteurEnPosition_1.0.zip